Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Detection of multiple changes in mean by sparse parameter estimation
NG 10 - Związek Polaków na Litwie
การลดสัญญาณรบกวนของการจดจําเสียงพูดด วยการ - TVIS
BİST - 30 MEKANİK ÖNERİ TABLOSU
İndir - Gıda Teknolojileri Elektronik Dergisi
Financování divadel v USA:
2 - MZK Chomutov sro
1.1 Symetrické polynomy - algebra2fi
pravne teme vol 3 - Univerzitet u Novom Pazaru
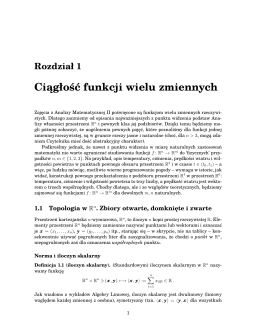
Ciągłość funkcji wielu zmiennych
Numer 2 - temat numeru: Cztery kwadryliardy atomów w Twoim ciele
LUMINESCE™ Balsam Do Ciała
PROCESORY SYGNAŁOWE – PRZYKŁADOWE PYTANIA część II 1
Tőzsde idősorok vizsgálata, elemzése
adaptív wavelet‐alapú zajcsökkentő eljárás mobilrobot
Ba˘glam A˘gaçları ile Ardısık Do˘grusal Olmayan Ba˘glanım
Odporúčané náterové systémy firmy Novatic SK na
F2F Elementary-SK
화예 공간 연출의 유형 분석에 관한 연구
Ochrona / Polityka ochrony dzieci Ashgrove Szkoła Podstawowa
pobierz - TATAREK
On Epsilon-Nets, Distance Oracles, and Metric Embeddings
istatistiksel daraltıcı - Çukurova Üniversitesi Fen Bilimleri Enstitüsü