Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Kalibrační teorie
Problémové úlohy.pdf
Standardní model částicové fyziky: stručná historie a současný stav
508 41 ELEKTRICKÉ VLASTNOSTI Elektrické vlastnosti plynů
Marathon 128
Matematický ústav AV ČR, v - MÚ AV ČR
the document in pdf format
Komutátorové stroje
ČÁSTICOVÁ ZLATÁ LÉTA ŠEDESÁTÁ Jan Hladký
to get the file
Stáhnout čtvrtý díl časopisu v PDF.
Patobiomechanika srdečněcévního systému
Letní semestr
Geometrické metody fyziky 1
Matematický ústav AV ČR, v - MÚ AV ČR
Unitární teorie pole - Úvod do teorie Cytoprostoru
Kovariantní derivace
newsletter 09/2015
Petr Kulhánek, Statistická fyzika
4 Perfektní a MDS kódy
O(1)
Katedra fyziky
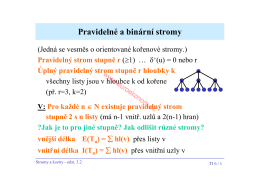
Diskrétní matematika [3mm] Planární (rovinné) grafy






![Diskrétní matematika [3mm] Planární (rovinné) grafy](http://s2.readgur.com/store/data/000342713_1-4a3b2df565c5af7f13a6c5d50a75d15b-260x520.png)