Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
S í č l h d áh Snímače polohy, dráhy a jejich derivací 2 a
Ski & Board
MECHATRONIKA - Střední průmyslová škola strojnická a Střední
ÚVOD - KEA - Technické meranie
VITANA NATURáčik
Untitled
Střední průmyslová škola elektrotechnická Františka Křižíka
(kontaktní, optické, magnetické, kapacitní a ultrazvukové).
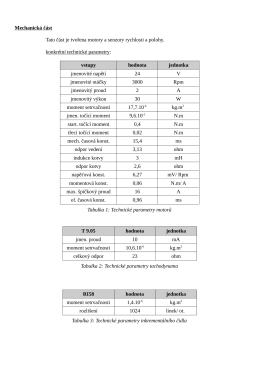
M echanická část Tato část je tvořena motory a senzory rychlosti a
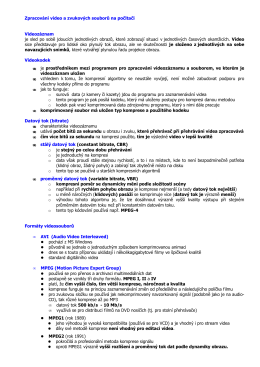
Zpracování video a zvukových souborů na počítači Videozáznam je
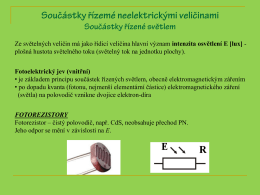
Elektronické součástky a obvody
miniElcor
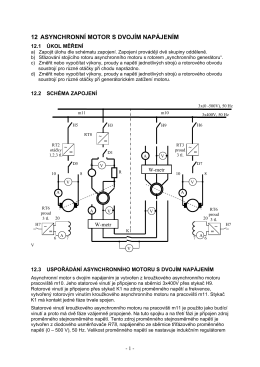
12 ASYNCHRONNÍ MOTOR S DVOJÍM NAPÁJENÍM
Elektronicky komutovaný motor
CENTRÁLNÍ DOPRAVA VAJEC
Senzory geometrických veličin
Měření otáček pomocí tachodynama
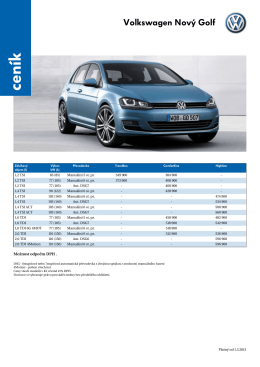
ceník - Volkswagen
Synchronní stroje
Speciální sedadla do osobních automobilů pro řidiče i spolujezdce
Prevence je lepší než napravovat škody
Sborník XXXVII. Seminář ASŘ 2013 - Fakulta strojní - VŠB
Příloha č. 4_Technická specifikace.pdf