Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Iterativní metody
0.1 Numerické riešenie systémov lineárnych rovníc
2x A4, od nějakýho Aldreda,vypada vcelku cool
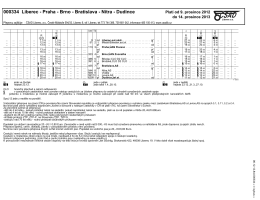
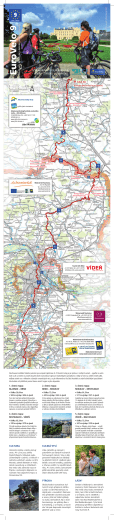
000334 Liberec - Praha - Brno - Bratislava - Nitra
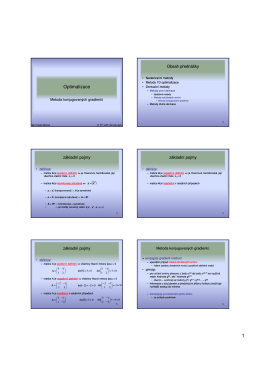
Optimalizace
Soustavy nelineárních rovnic
Výroková a predikátová logika
Predikátová logika
Euro Velo 9 Folder
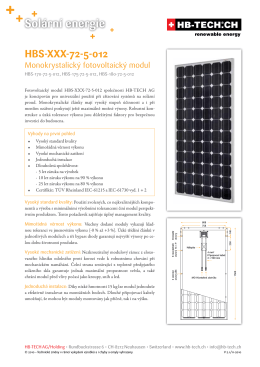
Technický list PDF - HB-TECH
Informace k předmětům CA01, CA02, CA04, CA06
Formální konceptuální analýza
Technická specifikace účastnických rozhraní poskytovaných
Vi 982 – Viton® pro zvláštní úkoly
Raspberry Pi
Úvodní přednáška
Zpevnik Brozura A6
MALOG 2014, Axiomatika výrokové logiky
Otázky k ústní zkoušce
Makale PDF - Güncel Gastroenteroloji
1a. Modely životního cyklu SW. Návaznosti a produkty jednotlivých
VSAM - Kmlinux