Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
skripta Automatizace 2 pro A4 (pdf)
AUTOMATIZAČNÍ SYSTÉMY I.
ŠKOLNÍ ŘÁD - Gymnázium, Nový Bydžov
avagy hogyan főzzünk szoftvert a közszférában
Přehled novinek pro sezónu 2013 JUBIZOL Microair Význam
Heli-Max 1SQ V-cam
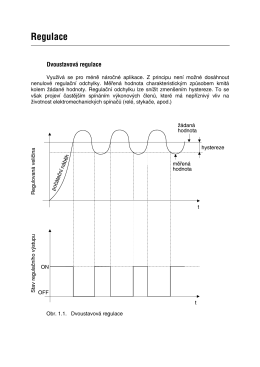
Jednoduchý popis dvoustavové a PID regulace.
Počítačová lingvistika Struktura jazyka Roviny analysy
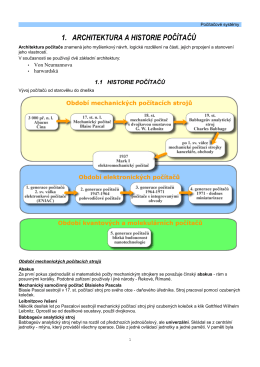
1. ARCHITEKTURA A HISTORIE POČÍTAČŮ
Návod k obsluze Vollcano 20
Sınav Kılavuzu (PDF)
Projektový manažment
treść scenariusza nr 4
regulované soustavy_PID
TEORIE SYSTÉMŮ - Personalizace výuky prostřednictvím e
inšpiratívne námety na žiacke experimentovanie - SFS
Vzor formatu prispevku CZ
Zápočtové písemky z loňského roku
3. Vybrané přístupy řešení neurčitosti
Adaptivní LMS systémy - Pedagogická fakulta
Temmuz - Eylül 2015
a KARTOGRAFICKÝ GEODETICKÝ