Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
NÁZEV HLAVNÍHO PŘÍSPĚVKU
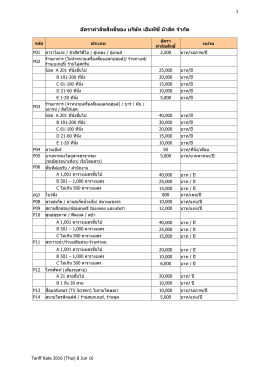
อัตราค่าลิขสิทธิ์ของ บริษัท เอ็มพีซี มิวสิค จ
Současný algoritmus likvorologického vyšetření Současný
Neuroborrelióza a intratekalní syntéza protilátek Iva Stoklásková
Arş.Gör.Hasan Sözen - Elektrik-Elektronik Mühendisliği Bölümü
NÁZEV HLAVNÍHO PŘÍSPĚVKU
BAKALÁŘSKÁ PRÁCE - Diplomová práce roku
Obsah
modelování a simulace rozsáhlých memristivních sítí
ke stažení
Word Pro
Paměti
POZVÁNKA Helena Reichlová
Research Assist. Hasan Sözen
Základy elektrotechniky – zápočtová písemka
15. 10. 2014 16. 10. 2014 Program of International Conference on
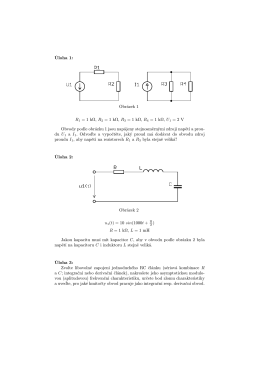
Úloha 1: Obrázek 1 R1 = 1 kΩ, R2 = 1 kΩ, R3 = 1 kΩ, R4 = 1 kΩ, U1
viii konferencja – szkoła - International School on Nonsinusoidal
detektory maximální- špičkové hodnoty
PAPER TITLE
NÁZEV HLAVNÍHO PŘÍSPĚVKU
stáhnout - Sprinx HPC