Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Zobrazovani_prostorovych_dat.pdf
Okruhy k MZ: Deskriptivní geometrie
Aproximační a interpolační křivky
deskriptivní geometrie 1
2 - Rutar
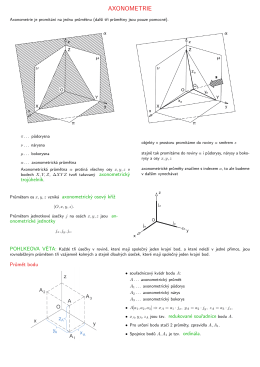
Axonometrie - podklady pro přednášku
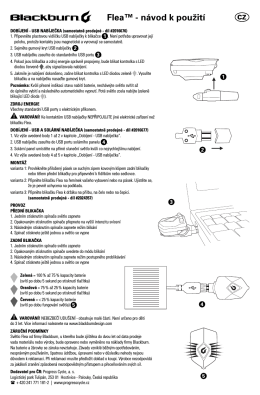
navod Flea 12 CZ_SK.indd - E-shop
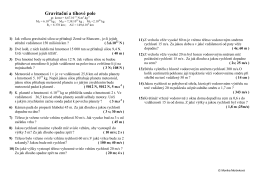
Gravitační a tíhové pole
Kartografické projekce - Matematika a Deskriptivní geometrie
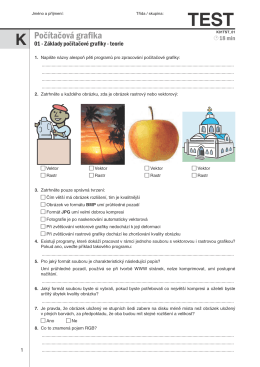
Test ze základů grafiky.pdf
Konzola - modelování těles v Inventoru
Sférická a Cylindrická perspektiva
Konstruktivní fotogrammetrie - Matematika a Deskriptivní geometrie
prezentace - Fyzika GJVJ
Požadavky k maturitní zkoušce z deskriptivní geometrie
Všechny příklady, pokud není řečeno jinak, jsou navrženy k řešení
Geometrie s didaktikou II
Příručka pro rychlé uvedení do provozu USB modem Vodafone
M N O Ž I N Y B O D Ů D A N É V L A S T N O S T I
Dobrý den. Chtěl bych požádat o radu : mám trubku o vnějším
Mongeovo promítání
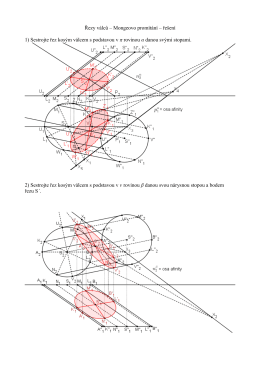
Řezy válců – Mongeovo promítání – řešení 1) Sestrojte řez kosým
Kartografické projekce - Matematika a Deskriptivní geometrie