Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Materijal za osnove DEA i modifikovani modeli
Merenje promena performansi, alokacija resursa i mrežni
Medzinárodný vedecký seminár Nové trendy v ekonometrii a
szkicami rozwiązań - Śląski Konkurs Matematyczny
o d p e o d p e
Tedarik Zinciri Yönetiminde Dağıtım Ağlarının
BSC i mere performansi
lekcija 2
榊郵ご1ユ:
Osnovni Principi Over Juniti Elektromagnetnih Masina
BROJ 111 (.pdf)
Yeniden Düzenlemiş Simpleks
EKLER
Akreditasyon Sertifikası Eki (Sayfa 1/4) Akreditasyon Kapsamı
Akreditasyon Sertifikası Eki (Sayfa 1/4) Akreditasyon Kapsamı
การออกแบบและสร้างเครื่องเขย่าขวดยาฉีดต้นแบ
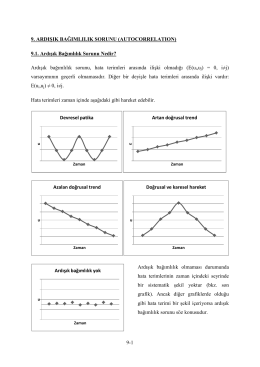
ardışık bağımlılık sorunu
Efficiency Analysis in Islamic Banks: A Study for Malaysia and Turkey