Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
MALÉ SERVOMECHANISMY PRO ROBOTIKU A MECHATRONIKU
RCS-RX-I06 NA V2
Hrátky s počítačem a robotem
Návod - Miloš Zajíc
pro vas - České dráhy, as
a další zajímavosti ze světa historických vozidel
Stáhněte si brožuru
Honeywell Témata magisterských prací 2014/2015 (Brno)
Hodnotiaca správa - Základná umelecká škola Sečovce
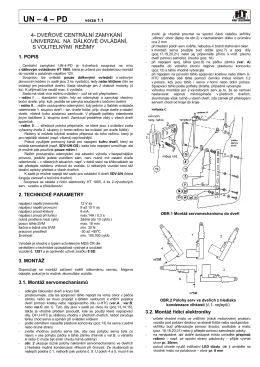
UN – 4 – PD verze 1.1
AxeMotor10 - Hobbyrobot
Fórum automatizace – hala V, č. stánku 4.16
Elektrické pohony a servomechanismy
Stáhnout - SPŠel•it Dobruška
Stmívatelný časovač TM 2026
Nominační listina rozhodčích 2015/16
Frekvencní menice
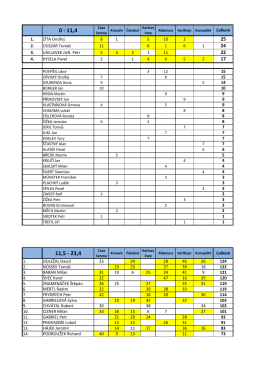
celkové výsledky meridian golf tour
Finanční řád spolku PASKOV.net ver. 2.0
Garance bezpečí s OTIS
NEWS Zlatý Amper 2015
CO JE DOPRAVA ?
Untitled