Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
y - Vanr.prof.dr. Lejla Banjanović
Osnovni elementi fuzzy sistema zaključivanja
การวิเคราะห ค วามแปรปรวน Analysis of Variance
Syllabus_Fuzzy Logic_2015-30-09-2015-19-04-16
Zbornik radova
Bulanık Mantık Bulanık Kesişim ve Birleşim
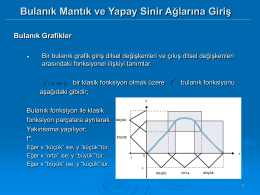
Bulanık Mantık ve Yapay Sinir Ağlarına Giriş
Makale PDF - Güncel Gastroenteroloji
(PDF, 3.97MB)
inteligentni sistemi - Vanr.prof.dr. Lejla Banjanović
inteligentni sistemi inteligentni sistemi
PU 2 Metode grupisanja - Vanr.prof.dr. Lejla Banjanović
SISTEMI REALNOG VREMENA Operativni sistem realnog vremena