Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
1. Derivacija funkcije
Matematicka analiza 3
SOYUT L NEER OPERATÖRLE ETK LENM “ B R SÜREKS Z
Stavebné povolenie
27.03.2015 Tarihli Galvanizli Sac Stok Listesi
Ispit iz Matematike II
Okruhy témat k Státní závěrečné bakalářské zkoušce
PitanjaUsmeniETF2014..
Poznámky k některým tématům z přednášky TMF057
1. Pojam realne funkcije realnog argumenta
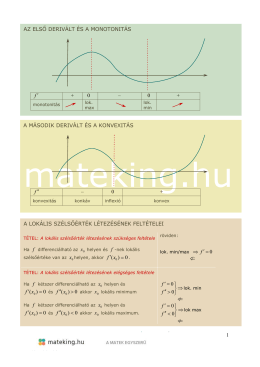
integrálás összefoglaló
Číselné a funkcionálne rady
l´Hospitallovo pravidlo, Mclaurinov rozvoj, priebeh funkcie
Lássunk néhány függvényvizsgálatos feladatot.
Funkcionální rady
Realna analiza IV gl..
null
ZDE
r - Elektrotehnički fakultet Istočno Sarajevo
Relaksacija spina u kvantnim tackama dopiranim jednim magnetnim
Emocionalna inteligencija
1.1 Neodre ¯deni integral
SADRŽAJ: - Reocities