Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
1. Pojam realne funkcije realnog argumenta
propozice ke stažení
Ispit, januarski 2 rok, 17.03.2012
PitanjaUsmeniETF2014..
PitanjaAnalizaI(2013..
Humansoft Corax Opis Systemu pdf - ARTO-Soft
1. Derivacija funkcije
Elementární funkce a základní elementární funkce
Různé přístupy k zavedení goniometrických funkcí
Дирихлеов принцип
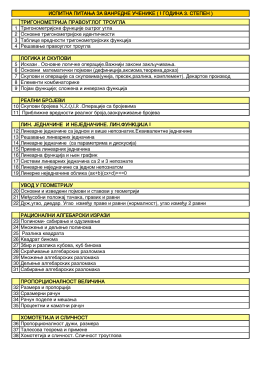
TRIGONOMETRIJA PRAVOUGLOG TROUGLA 1 Trigonometrijske
1. Skupovi - Front Slobode
Kalkulus I. Beugró kérdések és válaszok 2014/2015–ös tanév I. félév
Kapitola IV - Funkce jedné proměnné
Sazetak - Python 3
Emocionalna inteligencija
ANALITICKA GEOMETRIJA
Neprekidnost i limesi
MATEMATIˇCKA ANALIZA
ELEMENTI ˇ VISE MATEMATIKE
Matematicka analiza 1