Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Uvodni deo novog praktikuma-osnove rada sa mikrokontrolerima
int
WPROWADZENIE DO MATLAB - e
Internaupotreba
Priprema_za_lab_2 NOVO.pdf
STUDIES ON FUZZY LOGIC CONTROL OF ELECTRICAL
Јован Степановић - Конференција универзитетâ Србије
PSI PP407-408 - Kabim Elektronik
SRV 3 Ugradeni racunarski sistemi - Vanr.prof.dr. Lejla Banjanović
Fulltext #28
PDF dokument - ATLAS
TEHNIČAR ELEKTRONIKE
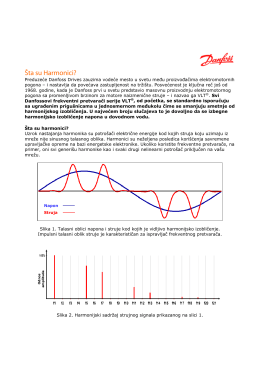
Šta su Harmonici?
Mikrokontrolery
tehničar računarstva
14-22 Ağustos 2015 - ÇOMÜ- Uzay Bilimleri Ve Teknolojileri Bölümü
Vodic 2016/17.indd - Banja Luka College
pdf
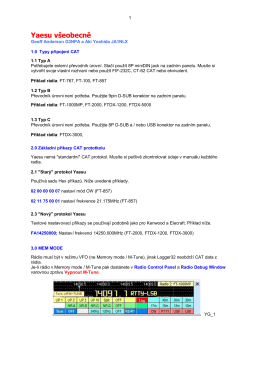
Ovládání TRXů YAESU
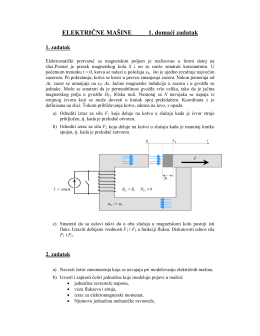
ELEKTRIČNE MAŠINE 1. domaći zadatak
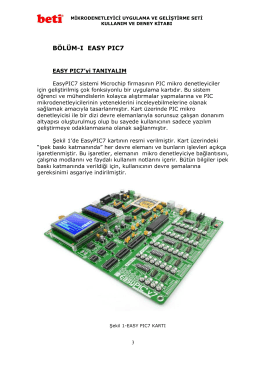
bölüm-ı easy pıc7
อ่านรายละเอียดเพิ่มเติม.
Antonii Stankiewicz człowiekiem roku 2014! KLIKNIJ