Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Mikrokontrolery
AUDIO A VIDEO VSTUPNÍ SYSTÉMY
Modul 3 - Hálózatok
1. Cvičení Hardwarové a softwarové řešení potlačení zákmitů
Kosmo
Infotronika
OZE p3
Příloha č. 2 - Technické řešení nábytku - základní zadání
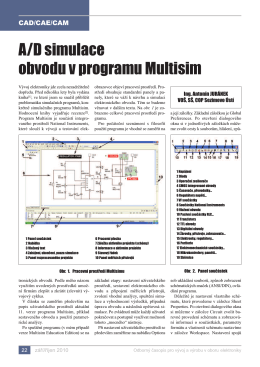
appendix - Globlex
primjeri arhitektura mikrokontrolerske platforme
Appendix 27-9-2016
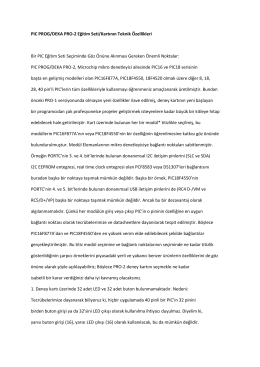
A/D simulace obvodu v programu Multisim
PIC PROG/DEKA PRO-2 Eğitim Seti/Kartının Teknik Özellikleri Bir
energetický audit (pdf)
PŘEPÍNÁNÍ A SMĚROVÁNÍ OPTICKÝCH
NEW YORK CITY A WASHINGTON D. C.
Glava 2 Daljinska kontrola
1-2013
Praxe-Elektronika pro 1. a 2.ročník
Uvodni deo novog praktikuma-osnove rada sa mikrokontrolerima
MAGYAR ÁLLATORVOSI KAMARA REGISZTRÁCIÓS ADATLAP
Témy pre 2 ročník DS
Plan Działań na Rzecz Zatrudnienia w Województwie