Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
(PDF, 307KB)
Uvid u to kako kvantne čestice mogu biti povezane
(PDF, 429KB)
Glava 1
Vježba 3. Digitalna obrada audio signala
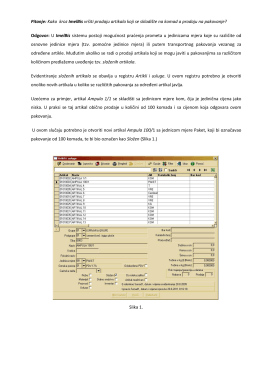
Kako vršiti prodaju artikala koji se skladište na
Poluprovodnici
3. vezbe
INDEKSI *Prosečna cena ̅ Grupni indeksi metod