Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
konvansiyonel olmayan iki farklı kontrol yüzeyinin yapısal
bir insansız hava aracının konvansiyonel olmayan esnek kontrol
konvansiyonel ve konvansiyonel olmayan kontrol yüzeyine sahip
konvansiyonel ve konvansiyonel olmayan kontrol yüzeylerine sahip
Czytaj dalej…
Bilgisayarınıza İndirmek İçin Tıklayın.
Feeding Systems 2014 01
V. ULUSAL HAVACILIK VE UZAY KONFERANSI 8
ulusal havacılık ve uzay konferansı
ulusal havacılık ve uzay konferansı
UHUK-2014 - SERVET BASOL Flight Safety
Quadcopter Nasıl Yapılır?
Quadcopter Nasıl Yapılır? 3
İndir - Uçak ve Uzay Bilimleri Fakültesi
Elektronik Kumandalı Bant Dokuma Tezgahı
Handheld Detection
Prof.Dr.Yavuz YAMAN
sonuç
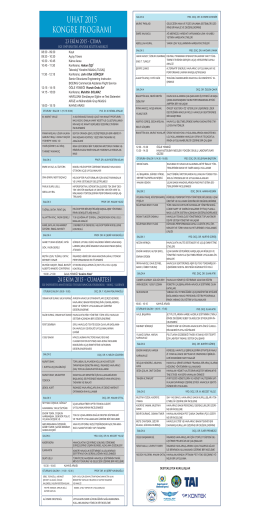
uhat-2015 kongre programı
E-Bülten (Eylül-2014) Adobe PDF
Projekt systemowy
Alt Ekstremite Mekanik Aks Değişimleri Sonucu Oluşan Varus Ve
2015 UHAT YAKA KARTI kdpi - UHAT 2015