Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Genel Stewart Platformları (GSP)
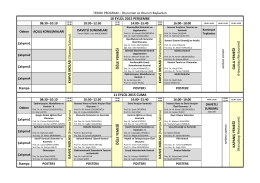
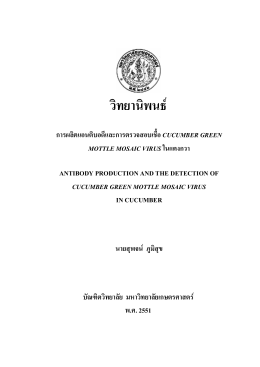
10 EYLÜL 2015 PERŞEMBE K AHVE M OLASI (Stampa
Üst Uzuv Dış İskelet Rehabilitasyon Robotları Exoskeleton Robots
Fulltext #1
PERŞEMBE KAYIT - 9:00 / 10:00 AÇILIŞ KONUŞMALARI– 10:00
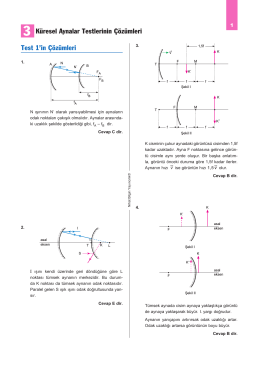
Küresel Aynalar - Nihat Bilgin Yayıncılık
A101 Yeni Mağazacılık AnadoluJet
Prof. dr. Ivana Novaković, Medicinski fakultet, Beograd
Political Business Cycle on the Agricultural Supports in Turkey
Model
Endüstriyel Robot Sistemleri - Erpe
Difüzyon Ağırlıklı MR Görüntülemenin Pankreasa Ait
Makale - Akademik Personel Bilgi Bankası
Arda Kristaporyan
zgłoszenia csi3 - Kadra Skoki.pl
Serbestlik derecesi - Ege MYO-İZKA
Wyniki finansowe i rynkowe Grupa Agora 1 kw. 2016 r.
İçindekiler
Ders İçerikleri - Uluslararası Antalya Üniversitesi
Robotek Katalog Sayfası
Dreamspark Nedir? - Kocaeli Üniversitesi Bilgisayar Mühendisliği
Download (PDF, 2.07MB)