Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Model
Mersin SMMM Odası 2017 Yılı Tahmini Bütçesi
tc kırklareli üniversitesi - KLU - Elektrik Elektronik Mühendisliği
PDF
DERS BİLGİLERİ
BEDA® Oksijen Emniyet Çözümleri
Genel Stewart Platformları (GSP)
ANALİTİK VE YARI-ANALİTİK YÖNTEMLERLE SERİ VE PARALEL
2014-2015 Öğretim Yılı Güz Yarıyılı Ders Programı PER ŞEMBE
Robot Bilimi Robot Algılayıcıları
ENDÜSTRİYEL ROBOTLAR
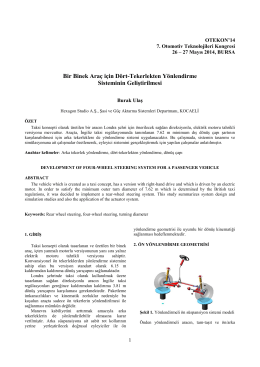
Bir Binek Araç için Dört-Tekerlekten Yönlendirme
ROBOT KĠNEMATĠĞĠ ÇALIġTAYI
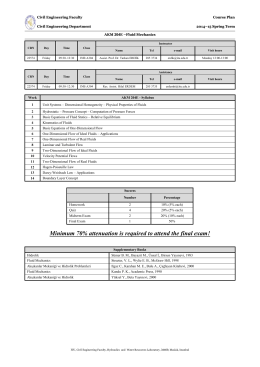
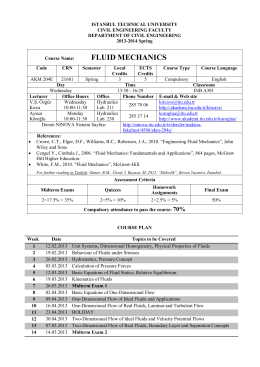
22574_AKM204E_Course Plan
Çizgi İzleyen Sumo
“Savaş değil Trafik Katliamı” Alpay Lök
fluıd mechanıcs
bilgisayar ve mekatronik mühendisliği bölümleri insan ve bilgisayar
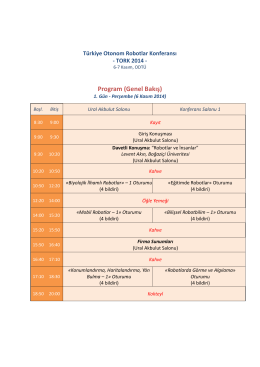
TORK 2014 Programı - Türkiye Otonom Robotlar Konferansı