Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Rektörümüz Prof. Dr. Reha Metin Alkan
a - 1
1•6 - Magyar Tudomány
Latin Amerika Mutfağının Kültürel Etkileşim Yolu (The Culturel
UPŠTE UPUTSTVO ZA UPOTREBU
652.95 KB - Inet-tr
dalje - Bosnia and Herzegovina UK Network
buraya - 21. Yüzyıl Türkiye Enstitüsü
Donanım Içeren Taşit Simülatörü İçin Taşıt Dinamiği
Bossa T.A.Ş. Premiere Vision Seyahati Raporu
Judul Buat Skripsi Jurusan Teknik Informatika
Seagate Dashboard Kullanım Kılavuzu
Sistem Analizi ve Tasarımı Dersi Notları için tıklayınız.
Překlad Grafiwrap_komplet
Feynman ve Bilim - İktisat ve Toplum Dergisi
Risk ve Teminat Yönetimi Hizmeti
UNIVERZALNI SERVIS U CRNOJ GORI
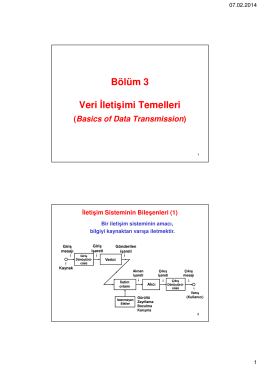
Veri İletişimi Temelleri
AS-84.144 Intelligent Machines and Special Robotics - Ege MYO-İZKA
WP22: Human Centered Cabin Design (modely lidských faktorů a
Akademinin Atıf Dizinleri İle Savaşı
Nefes Darlığı ve Konstipasyon ile Ortaya Çıkan