Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
www.elektrovadi.com
R - Karadeniz Teknik Üniversitesi
Manual - PowerWalker
Arduino II
9. Ardunio ve Uygulamaları 2 - Mekatronik Mühendisliği Bölümü
Algılayıcılar ve Algılayıcı Seçimi
การออกแบบแขนกล
IL Zavora ELKA
Mobilny robot klasy minisumo QuoShyan
ESL_Digital_Logic_Lab_5_2014-07-20
R - Karadeniz Teknik Üniversitesi
otomasyon sistemleri - Kocaeli Üniversitesi
arduıno programmıng
Epson Stylus Photo PX660
Deney Föyü
equIP® Serisi HD Kapalı Mekân IP Minidome Kamera
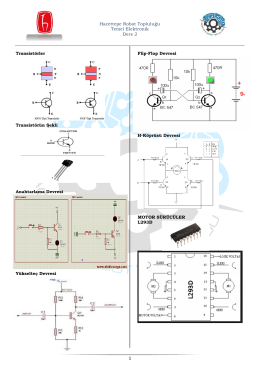
Hacettepe Robot Topluluğu Temel Elektronik Ders 2 Transistörler
PIC PROG/DEKA PRO-2 Eğitim Seti/Kartının Teknik Özellikleri Bir
Park Sensoru Uygulamasi
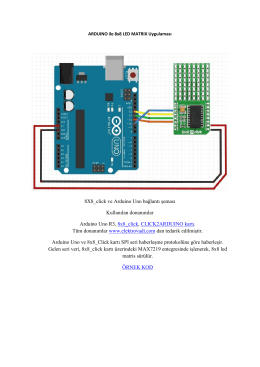
Arduino Uno R3, 7_seg Click, CLICK2ARDUINO kartı
R - Karadeniz Teknik Üniversitesi
ATC-3200 ZigBee to RS232/422/485 Çevirici Kullanıcı Kılavuzu
8X8_click ve Arduino Uno bağlantı şeması Kullanılan