Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
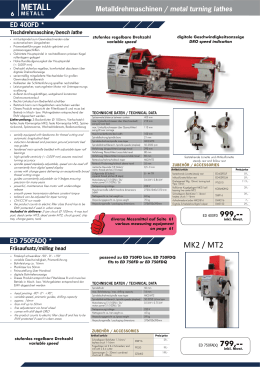
Využitie CompactRIO systémov pre riadiace aplikácie
metall - drevarskestroje.sk
Konstrukce
Vývoj aplikácií v LabVIEW pre meracie úlohy s CompactRIO
Skrócony katalog głowic i akcesoriów Phoenix (j.pol.)
žilinská univerzita v žiline elektrotechnická fakulta
Toggle navigation BrandLogo OZHAT LTD. AnaSayfa Markalar
Labview ismerteto.pdf
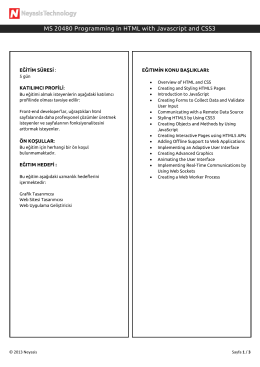
MS 20480 Programming in HTML with Javascript and CSS3
Unduh file PDF ini - Jurnal Universitas Trunojoyo Madura
23. Kompas
User manual
Lab. 4 Typy danych w LabView, zapis do pliku
PROJEKT CZASOWEJ ORGANIZACJI RUCHU Z PODZIAŁEM NA
Pyxis HP U - TROX BSH Technik Polska Sp. z oo
Verzia v PDF - Leaderpress
Dell Storage Center Úložný systém SCv2080 Příručka Začínáme
01/2013 - Acta Informatica Pragensia
ICN - Instytut Telekomunikacji
Výročná správa UJS za rok 2012
NEKE DEFINICIJE: Računar je uređaj opšte namene, koji služi za
Wonderware Application Server 2012 - Co je nového
Табела. 9.3 Компетентност наставника Презиме, средње слово