Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
3 tiažové pole zeme
F G + =
Korekcie v rámci tvorby UBA časť 1
KLASICKÝ POSTUP BUDOVANIA GEODETICKÝCH
modelovanie prielomovej vlny s využitím metód povodňového
Test - Voľný_pád
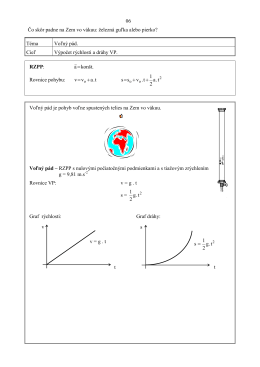
t t.g 2 1 s = s 06 Čo skôr padne na Zem vo vákuu
Možnosti určenia nadmorských výšok v lokálnych
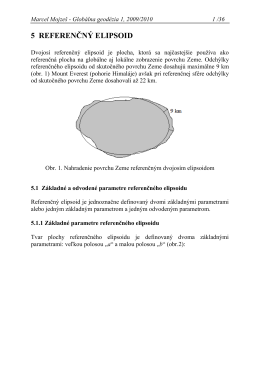
5 referenčný elipsoid
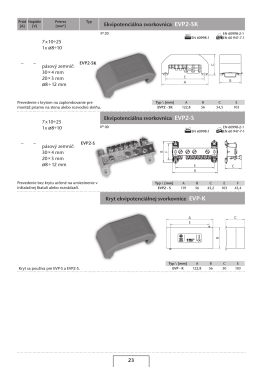
katalógový list
elektrické pole 1. elektrický náboj, coulombov zákon
10 Budovanie vertikálnych referenčných systémov
91 Prečo vtákom, ktorý sedia na drôtoch vysokého
Príručka aplikácie Mapy CDB
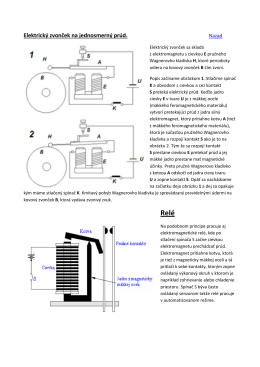
Elektrický zvonček na jednosmerný prúd.
DEFINÍCIE: KLASIFIKÁCIA, KRITÉRIÁ, METÓDY
HYDRAULICKÝ VÝSKUM RYBÍCH PRIECHODOV
Vektorové a skalárne polia
Náležitosti Komplexnej odbornej práce
technický list
odvolávacie údaje.pdf
WhatsNew Scia Engineer 2012 SK.pdf
Úvod do gravimetrie