Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
indir
İmalatta Kullanılan Mal Bilgileri Tablosunun
BİLGİSAYAR DESTEKLİ TASARIM (Teknik Resim-II)
sinavsonrasidersNTPgiris_oop
Bilgisayarla Görüye Giriş
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu
9. Uluslararası İşçi Filmleri Festival İstanbul Gösterim Programı İçin
PECS Resim Değiş Tokuşuna Dayalı iletişim Sistemi
aydın-izmir civarının hava manyetik verilerinden ısı akısı değerlerinin
Yavaslık ˙Ilkesini Kullanarak Öznitelik Seçimi: Alakalı Öznitelik
olasılıksal sismik tehlike analizleriyle tümleştirilmiş, sahaya özel
Kolay ve güvenli bir kan testi
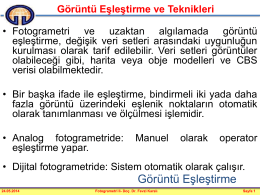
Görüntü Eşleştirme ve Teknikleri
haar-benzeri öznitelikler ve basamaklı
Linkteki dokümanı okuyun
analýza jasových profilů při excentrické fotorefrakci
View/Open - Hakkari Üniversitesi
DEĞERLİ ÖĞRETİM GÖREVLİLERİ Travnik Üniversitesi 2014
Bambu Ağacı Bambu, diğer ağaçlardan çok farklıdır. Çinliler bu
Sunu61.41 MB
Bilgisayarla Görüye Giriş
öklidyen olmayan bir uzayda weıtzenböck eşitsizliği
Bilineer Enterpolasyon