Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
İndir - WordPress.com
Çalışma Soruları - Kırklareli Üniversitesi Personel Web Sistemi
Sunu 7- Mafsallý Miller
Izbor mogućih zadataka za mašinijadu iz oblasti mehanike
prilog analitičkom modelu ponašanja kružnog tunelskog iskopa
Önellenőrző kérdések
VERME REHBERİ
öğrencilerin bireysel ve birlikte çalışma durumlarında matematiksel
Modern Anlatı EksenindeGöstergebilimin Tasarıma Etkisi
Fourier Serisi - Bilecik Şeyh Edebali Üniversitesi Makine ve İmalat
amputasyon ameliyatı bilgilendirilmiş onam
Bülten 28 Türkçe - Türkiye Cimnastik Federasyonu
bölüm 3-1
Predavanje br.5
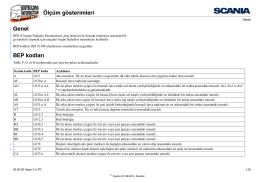
Kısmi dönüşlü aktüatörler SQ 05.2 – SQ 14.2/SQR 05.2 – SQR 14.2
Aynı Renk Top Beklentisi
Konuşmanın tam metni
Ekonomiczna i efektywna (Trailer 2011)
Mek. Tek. MEKANİZMA TEKNİĞİNE GİRİŞ
BWM_0000221_19
acgh-pgs - Preimplantasyon Genetik Tanı (PGT)
ders içerikleri - Hacettepe Meslek Yüksekokulu
Geometri Analitik