Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Odporové snímače polohy (480kB.pdf)
LOGICKÉ OPERACE v AUTOMATIZACI
Venkovní odpínače Fla 15/6400
Ventilátory JET
Integrovaná střední škola, Kumburská 846, 509 31 Nová Paka
TM BISTERIL - Sanitacia.sk
Přehled produktů IAI - REM
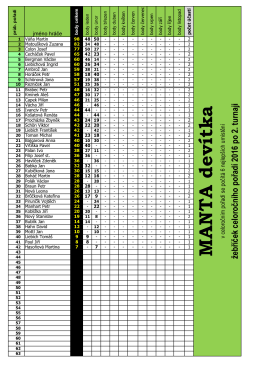
žebříček - BowlingWeb
KATALOG - ZPA Pečky, as
SILOMAX – P, PT, Plan - TERMOREG, firma pro automatizaci
3 dcérske spoločnosti
VYHODNOCENÍ INTENZIT SRÁŽEK V LETNÍM A ZIMNÍM
KATALOGKATALOG - ZPA Pečky, as
MONTÁŽNÍ NÁVODMONTÁŽNÍ NÁVOD
Otevřít leták nůžkové zvedáky
Stáhnout soubor
Sekční garážová vrata, automatické systémy sekčních vrat
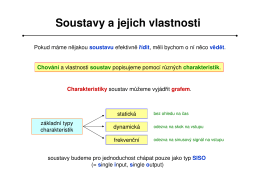
Soustavy a jejich vlastnosti
Výkup papiera
plovákové spínače
null
aneb jak pracovat se zážitkem ve skupině
převodník APAQ-LC INOR