Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Szweda: Dynamicka analyza rovinneho mechanizmu.pdf
Barbar 04_2015
Výběr - Místní akční skupina ŠIPKA
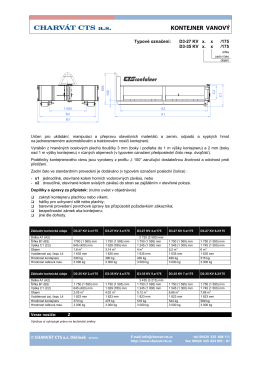
Prospekt kontejnery_D3-27-35 KV-175_CZ_2015
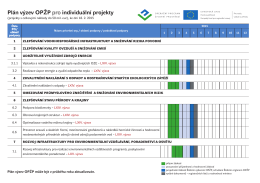
Plán výzev OPŽP pro individuální projekty na rok 2015
Vazby a vazbové síly
Poruba: Modalni analyza zvedaci plosiny s nelinearni vazbou.pdf
Údajový list VIBROPORT 80
Maturitnà okruhy EZ - Střední průmyslová škola strojní a
Prospekt kontejnery_D3-28 KVAL_CZ_2009
Aktuelne metode ispitivanja mostovskih
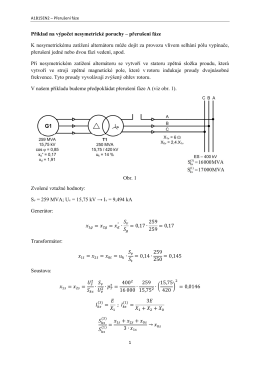
Přerušení jedné fáze
NOVÝ CASE IH OPTUM CVX
Sociopat je patologická osobnost.pdf 185KB 11.9. 2012 11
MMS 2013
Rodný dům Josefa Hoffmanna v Brtnici – stálá expozice
Technický list
zde - Nadace OKD
Zápis KR č.16 - Rozhodčí MS KFS
Komentář k vývoji cen tepla v roce 2015 a aktuální situaci teplárenství
Řízení hydraulických a pneumatických mechanizmů
Pokyny ke 2. testu
7 - Skalná