Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Senzory, jejich funkce, základní principy, motory
Otvorena-informatika-Testy-vzory-OI-okruhy.txt
Michal Dudek - Olympiáda techniky Plzeň
Další část okruhů A3B38MMP 2015 (látka, která nebyla okruzích k
A3B35ARI – Automatické řízení – zkouška písemná 17. 6. 2015 10
Pouˇzitı gitlab v predmetech Pogramov´anı 1/2
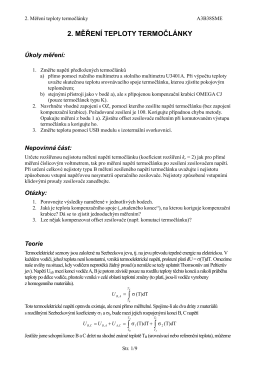
6. Senzory elektrického proudu. Měření výkonu.
Termočlánek, měření jeho napětí, kompenzace teploty srovnávacího
automatizační prvky elektronické součástky profilové systémy
kon.setBackground(Color.green)
import java.awt.
Státnicové okruhy
DůM NaD MarjÁNKOu
33_Snímače tlaku(3)
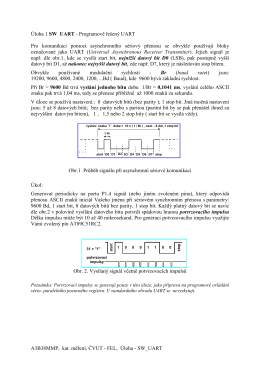
Jednoduchý UART
10 Marcin PAWLAK - Instytut Maszyn, Napędów i Pomiarów
Répéteur Wi-Fi double bande AC1750 TP-LINK RE450
Implemetace SW UART
ses_sensorleri
Program předmětu 2015 - Katedra elektrických pohonů a trakce FEL
Optický reflexní vláknový snímač polohy
Náběh aktualizovaného bakaláře OI
ZÁKLADNÍ ANALÝZA SÍTÍ TCP/IP