Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
1 Motory s permanentními magnety
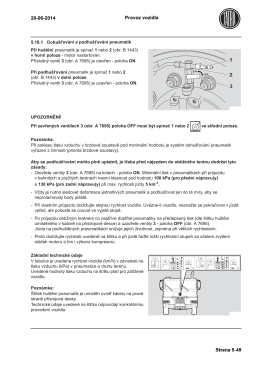
Návod k obsluze Tatra 2.
Propozice soutěží Letní všestrannosti
II Bezdrátový dálkový ovladač YT1F - cajka
Stropní indukční vyústě Typ DID-E
Stropní indukční vyústě
Page 1 ! " # $% ! " & ` ( )` ! ! *+&, -. ///` 01`23 40 5 5 6 7 01`23 Page 2 1
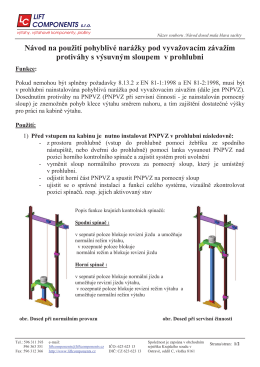
Návod na použití pohyblivé narážky pod vyvažovacím závažím
Elektropneumatický pohon typ 3274
Oyunun Kuralları 3, 2, 1! Kalkış!
GEMEX® Przeniesienie napędu
this PDF file