Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Elektrické stroje a přístroje 1
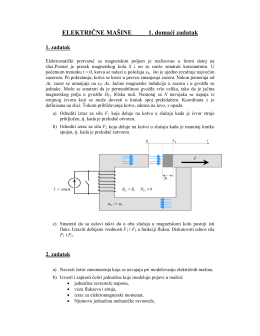
ELEKTRIČNE MAŠINE 1. domaći zadatak
ELEKTRONIKA A ELEKTROTECHNICKÁ MĚŘENÍ Obor: 26-41-L
LRP X20 7,5T
Řídící jednotka YP-12-009 s LCD displejem Návod k - E
ke stažení
Elektromagnetické pole, vlny a vedení (A2B17EPV) – PŘEDNÁŠKY
Více o Spa Jet 4G ke stažení zde
Katalogový list
James Clerk Maxwell a zrození dynamické teorie
zde - pulsFOG
amper 2013 - Technický týdeník
Elektrické stroje (PB107, KB 107)
Stáhněte si PDF soubor zde
Sortiment a výhřevnost uhlí
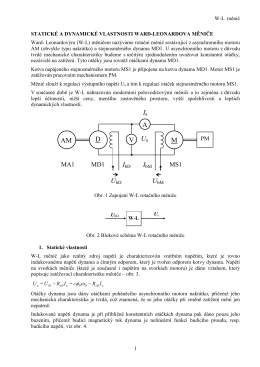
W-L měnič
český návod - kupteraz.sk
6 _ Univerzální seriový motor
Co dokáže bezdrát s optikou v síti NGA
3 _ Stejnosměrný komutátorový motor DC
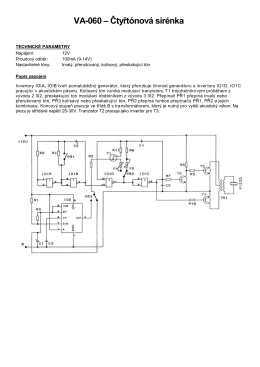
VA-060 – Čtyřtónová sirénka
Numerické modelování problémů elektrotechniky
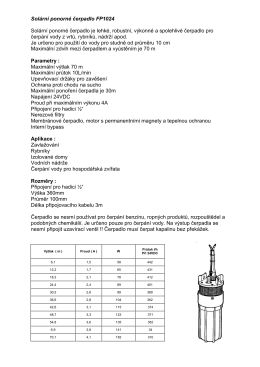
Solární ponorné čerpadlo FP1024 Solární ponorné čerpadlo je