Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
nanoQUAD rev.1
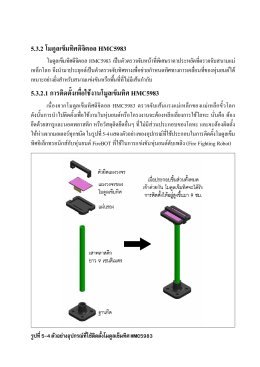
เอกสารแนะนำโมดูลเข็มทิศดิจิตอล HMC5983
proje önerisi hazırlama proje yazarken dikkat
Rozwój systemu robota mobilnego
Informační Technologie
Programátor Biprog verze 4.2
zde
Manuál Ulthera CZ.pdf
Pracovní sešit k přednáškám
openMagazin 2/2011
8. – 10. června 2014
stahuj! - Monitor
R - Karadeniz Teknik Üniversitesi
Absolventská práce Výroba interface pro měření mozkové aktivity
Web Üzerinden Labview Kullanarak Altı Eksenli Robot Kolu Kontrolü
Inwerter trójfazowy Spirvent , Wolta 10 kW – polska koncepcja.
Přesný inerciální navigační systém kategorie „Tactical grade"
Pobierz załącznik Nr 1.
Falownik trójfazowy Spirvent , Wolta 10 kW – polska koncepcja.
Bina˙Içi RF Sinyallerindeki Gürültülerin Kalman Filtresi ile
Sensörler ile Arduino
LED diody - LED
Aktuální slevy - LED