Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Rešení diferenciálních rovnic v MATLABu
rozvrh 2016-2017 ZS 2KS - České vysoké učení technické v Praze
Szabados újság
Vybrané numerické metody
Forex Akşam Bülteni
Výroková a predikátová logika
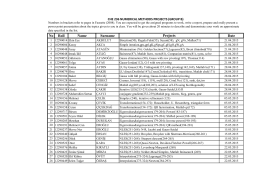
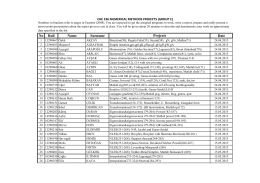
No Roll Name Surname Date Projects
Projects (Group C)
EET305 Kontrol Sistemleri Dersini Alan Öğrencilerin Dikkatine!
Květen / červen - Rokytnice nad Jizerou
เฉลย การแก้ระบบสมการเชิงอนุพันธ์ โดยการแปลงแ
Úvod do parciálních diferenciálních rovnic
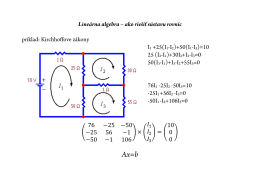
Lineárna algebra – ako riešiť sústavu rovníc príklad: Kirchhoffove
Základy algoritmizace a programování
บทที่ 10 การวิเคราะห การถดถอยพหุ
origin 1
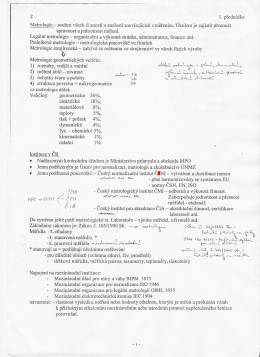
zde - STROJAR.COM
problematika uplatnění expertních systémů u elektrických
Prepravný poriadok dopravcu LTE Logistik a Transport Slovakia sro
Statické momenty a tezište prurezu - pouzití
E-learningová aplikácia na výučbu návrhových vzorov
ปัญหาค่าเริ่มต้น
listy zadań z odpowiedziami