Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
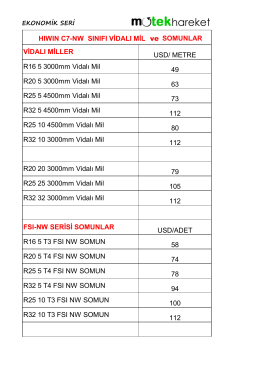
polohovací systÉMy
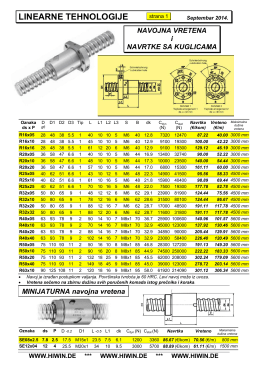
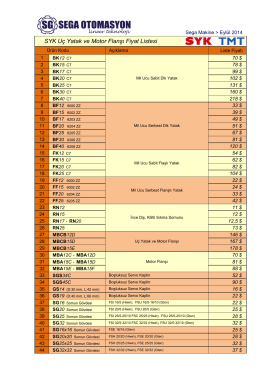
METRE R16 5 3000mm Vidalı Mil 49 R20 5 3000mm Vidalı Mil 63
Pelargonium graveolens
Příloha č. 3 Odůvodnění zacílení výzvy
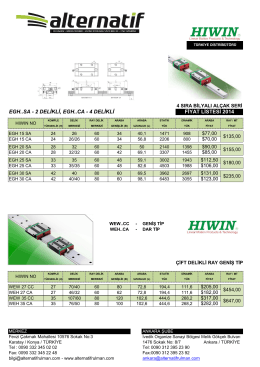
EGH..SA - 2 DELİKLİ, EGH..CA - 4 DELİKLİ
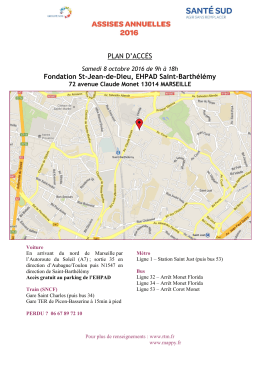
plan d`accès
Mladen Miljanović - GALERIJA ATELJE DADO
Vild M., Pokročilé modelování přípojů ocelové konstrukce na
TECHNICKÉ PODKLADY
Větrací mřížky Pásy vyústí
LINEARNE TEHNOLOGIJE
Web 2014 H
Automatizace, manipulace