Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
SBORNÍK
menu ke stažení
ke stažení - Klub kultury Uherské Hradiště
ŢILINSKÁ UNIVERZITA V ŢILINE Softvérové vybavenie
ZŠ Pastviny - Technické školky
Klinicky pripad: Stopkata polypoidna lezia na stehne
Manuál k modulu RC
Jak správně zapojit ventilátor s časovým doběhem a hydrostatem
Slovo starosty: Městská část žije - ÚMČ Brno
IRA č. 5 2013 Smernica k VO
rodina brezen
ศักยภาพการปฏิบัติการทางวิทยาศาสตร์ ในห้องปฏิบัติการทดลอง
únor 2016 - Pocitové mapy
katalog postelí
คู มือการใช งาน POWER ACEX1K SERIES
Łatwiej o eko-dotację
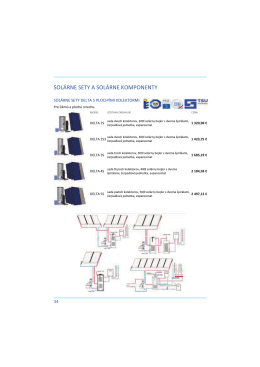
SOLÁRNE SETY A SOLÁRNE KOMPONENTY
Školní vzdělávací program - Základní škola a Mateřská škola Olšany
Témata z ekonomiky
Diplomová práca
Zde - EurOpen
Otevřít toto vydání
cz - O SMT-info