Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
KATALOGKATALOG
KATALOG - ZPA Pečky, as
Zpráva o revizi elektrického zařízení
KATALOG - ZPA PEČKY SLOVAKIA
Untitled
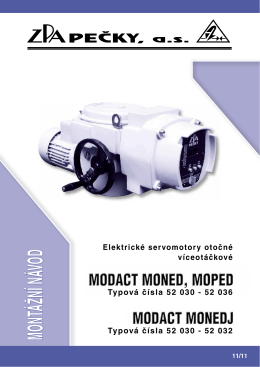
modact moa oc
Akıllı Telefon Seçiminin Belirleyicileri
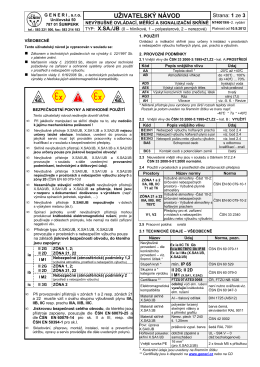
MONTÁŽNÍ NÁVODMONTÁŽNÍ NÁVOD
Stáhnout soubor
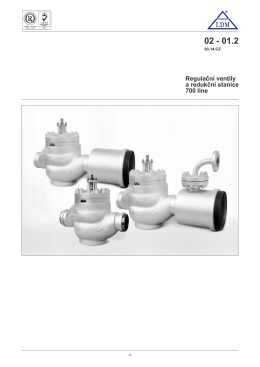
Regulační ventily a redukční stanice 700 line
pohony ZpA pEČKy SERVOMOTORY JEDNOOTÁčKOVÉ
Vybrané testové otázky z vyhlášky 50/78 Sb. -1
KATALOGKATALOG - ZPA Pečky, as
KATALOGKATALOG
Stáhnout soubor
taban aritmetiği 2
KATALOGKATALOG - ZPA Pečky, as
MONTÁŽNÍ NÁVODMONTÁŽNÍ NÁVOD
Tepelná čerpadla vzduch
Metodika pro využití samostatných vzorových el. obvodů
Alap hosszú neve
Návod-GYSMi 131-161-190
Poslední volné byty v novostavbě bytového domu na