Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
přednáška4 (.pdf)
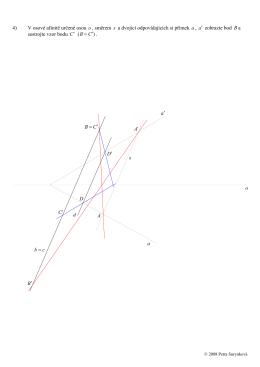
4) V osové afinitě určené osou o , směrem s a
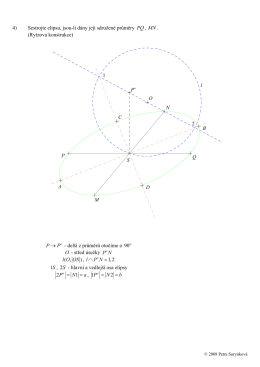
4) Sestrojte elipsu, jsou-li dány její sdružené průměry PQ, MN
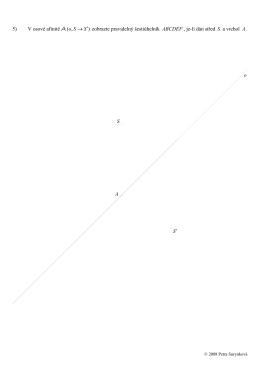
5) V osové afinitě A( , ) o S S′ → zobrazte pravidelný šestiúhelník
Geometrie architektura umění - RNDr. Petra Surynková, Ph.D.
Základy programování v programu MATLAB
IV.7 Taylorovy řady elementárních funkcí
Geometrie architektura umění - RNDr. Petra Surynková, Ph.D.
2 Interpolační polynom a splajn 2 Interpolační polynom a splajn
Programování I (PRM044) – Cvičení č. 6
8. DÚ
5EN202 Mikroekonomie I
Aproximace funkcí a numerická derivace
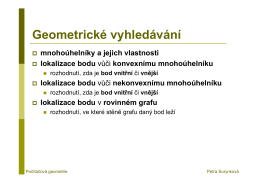
Geometrické vyhledávání
přednáška (.pdf) - RNDr. Petra Surynková, Ph.D.
Informace k předmětům CA01, CA02, CA04, CA06
presentation (.pdf)
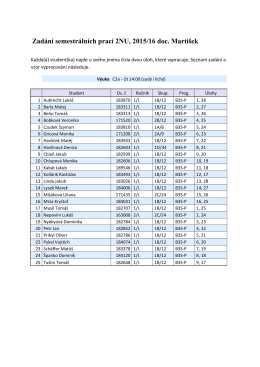
Zadání semestrálních prací 2NU, 2015/16 doc. Martišek
Télécharger l`article au format PDF - Fédération Inter
Poznámky k některým tématům z přednášky TMF057
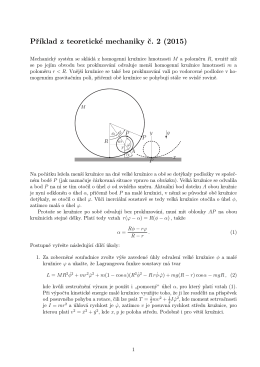
Příklad z teoretické mechaniky č. 2 (2015)
1. Fourierova transformace
null