Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
null
4 - Vlastnosti systému: Stabilita, převrácená odezva, řiditelnost a
katalogový list - ELEKTRO HADRAVA sro
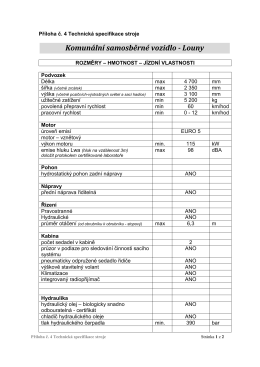
Příloha 4 Technická specifikace stroje
Oxidační číslo. Oxidy, hydroxidy, kyseliny a soli.
Česká pojišťovna – technický pohled
Vitásek, T.
2 Interpolační polynom a splajn 2 Interpolační polynom a splajn
1. Odporúčania k inštalácii Descaler
otevřený dopis
Birim Program Öğrencino Adı Soyadı Grubu Şubesi Speaking Club
montážní návod pro otevření zapalování na motocyklu
null
2. cast.pdf
8_Bloková algebra
Návod TV 5518 - Topení Regulace
7 - SEW-Eurodrive
"Učení s chutí" (UceniSchuti.pdf)
zde - CzechInno
Cvičení ze statistiky
Faktorizace velkých Łísel
Opakovací test 1/7 – AUTOMOBILY 1 (elektronika brzd), skupina A
1. Fourierova transformace