Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Breviář vyšší matematiky
Soupis seminárních prací
Obecně závazná vyhláška č. 2/2015, o místním poplatku
500 let od vysvěcení kostela nanebevzetí panny marie v blatné tela
Vyhláška o místním poplatku za odpad
2. díl - Rovnice a nerovnice. Planimetrie
Zásady pro poskytování grantů hl. m. Prahy v oblasti
Studentská konference a Rektorysova soutěž
Document
hydrodynamika a hydrodynamické stroje
Čtyřúhelníky
Křivkový integrál – příklad 4 Určete ∫ x2 ds, kde C
Otázky k ústní zkoušce
Veřejná vyhláška 2/2015
Montessori pro rodinu – leden 2014
OZV 3/2015
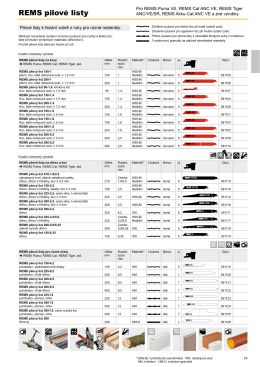
REMS pilové listy
Motion Control Funkce
generovanie rotačných plôch a ich vizualizácia pomocou ikt
plán bezpečnosti a ochrany zdraví při práci na staveništi
PROMOTE MSc
Diferenciální pocet, pokracování
Křivkový integrál II. druhu (vektorového pole)