Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
zde - Časopis SILNICE ŽELEZNICE
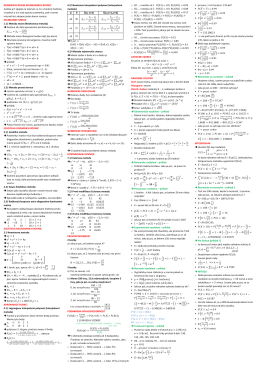
NUMERICKE RESENI NELINEARNICH ROVNIC Jestlize je f spojita
ZADANIE DIPLOMOVEJ PRÁCE - KTEBI
Montaj ve kullanım kılavuzu - Müller Elektronik GmbH & Co.
Bulletin 2010 - Česká společnost pro zdravotnickou techniku
obsah cvičenia (PDF)
KALENDÁŘ MODELÁŘSKÝCH SOUTĚŽÍ V ROCE 2012
Karta produktu_kanałowe wysoki spręż287 kB
Kompletní návod v češtině (PDF)
Polynomická interpolácia, podmienky spojitosti
Číslo 2/2013
WX Series - Batimetrik
Stáhnout materiál Testové otázky ke zkoušce
S P R I N G M A C H I N E w w w . h i d r o k o n t r o l . c o m . t r
Slovo úvodem Film o žárovém zinkování
Článek
Bulletin 3/2010 - Česká společnost pro mechaniku
Návod k montáži a obsluze - Müller Elektronik GmbH & Co.
Měření šumového čísla
instrukcja do ćwiczenia 9 - Inżynieria Ruchu Morskiego
METODE PRECIZNIH GEODETSKIH MERENJA
Tři atributy Musíme být stále lepší než naše konkurence
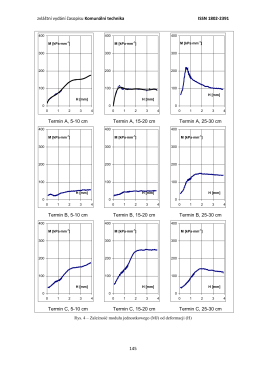
zvláštní vydání časopisu Komunální technika ISSN 1802