Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Auto II
Výzva k podání nabídky „Dodání dodávkového
Školní vzdělávací program - Střední škola a Mateřská škola
Ozubené převody
FYZIKÁLNÍ SEKCE Druhá série úloh
Zobrazit PDF ukázku knihy AUTOMOBILY II pro 2. ročník UO
Katalog oken a dveří - B
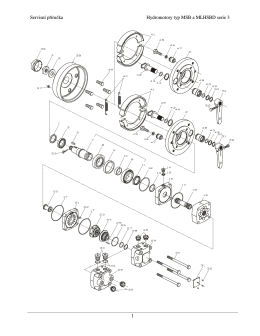
Servisní příručka Hydromotory typ MSB a MLHSBD serie
Brožura řady DAF Euro 6
Rosatom dostaví maďarskou jadernou elektrárnu Paks
Tématické okruhy k ZZ z předmětu Opravárenství a diagnostika pro
Katalog Verso.pdf
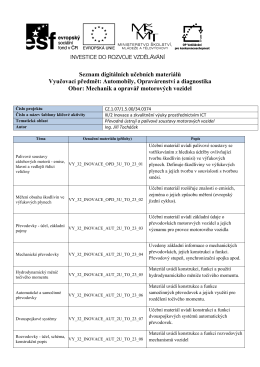
Seznam DUM
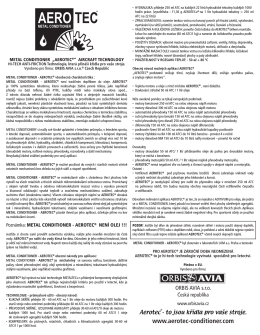
návod aerotec_cs
Mgr. Jitka Chizzola Na cesTách
Automobily
návod k obsluze traktoru W5032, W5033
Návod k obsluze a údržbě FORTERRA 8641 9641 10641 11441
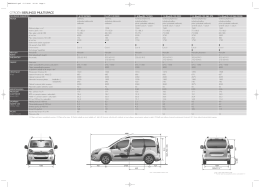
Technické parametry
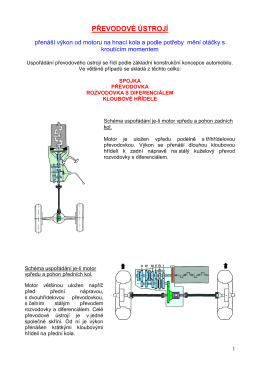
Automobily - převodové ústrojí
Ceník - Dacia Česká republika
Katalog CZ 1 - TROMA
POZVANKA na seminář CAHP 1-3-2016 -850