Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Pomocné texty pro přípravu ke státním zkouškám
Jednofázový a dvojfázový simplexový algoritmus.
NGEF - Investiční příležitost - Duben
POKYN K VYPLNĚNÍ SOUPISKY ÚČETNÍCH DOKLADŮ
prevence chybovosti při zpracování monitorovací zprávy se žádostí
BCZA_spektralni_analyza.pdf
Základy spojité optimalizace Lineární prg
– prohledávání grafů – DFS – Depth first search – BFS – Breadth
Maximální chyba
Číslo pi je iracionální
Kapitola V - Funkce více proměnných
Tématické okruhy pro magisterský studijní program M2109
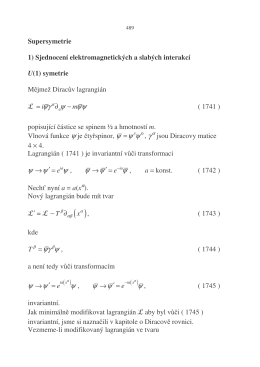
Unitární teorie pole - Úvod do teorie Cytoprostoru
Kapitola 9 - Úvod do teorie pole
Lineární programování
Matematické programovanie
Matematické programovanie
Kvantitatívne metódy v ekonomike
BEZP. LIST DP AMBERLITE - Interspark Praha spol. s ro
Untitled
1. cvičení
1 A
null