Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Биографија Бранко Вукелић је рођен 10.05.1985. у
Pobieranie moczu Pobieranie kału - Ginekologiczno
Robotik ve Gömülü Sistemler Lab.
LC 221 - Grundfos
RCZ CENÍK AKČNÍ NABÍDKA
Ovde - etran - Elektrotehnički fakultet
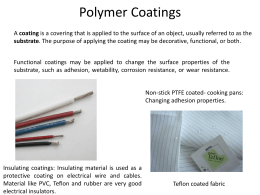
PolymerCoatingsLecture1
OVDE - etran - Elektrotehnički fakultet
OVDE - etran - Elektrotehnički fakultet
L E C T U R E S
Pracownicy Instytutu
Zobraz PDF
ÖZGEÇMĐŞ - İstanbul Teknik Üniversitesi
W Y K Ł A D Y
Życzymy Państwu, aby Wasze Dziecko jak najszybciej wróciło do
program 2013 - Polskie Towarzystwo Neonatologiczne
XL. májové hepatologické dny Karlovy Vary, 16
ลองเล่น และใช้งาน
Instrukcja dla autorów
9. Ekologia płodności. Zdrowie prokreacyjne a zdrowie noworodka
DIFFERENTIAL PRESSURE TRANSMITTER with
Specjalizacja dla położnych w dziedzinie pielęgniarstwa