Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
1. DISKRETNI LOKACIJSKI MODELI 1.1 Lokacija jednog objekta
Predavanje 8 (17.11.2014.)
PROGRAM KONFERENCIJE - Informaciono Društvo Srbije
UGODNOST
FABRIKA VODE „ZLATNA VODA“ Eeksploatacija pijaće vode je na
odgovorom
Polarizacija u električnom polju - Departman za fiziku
Sborník odborných prací TOMUS 36 (2011)
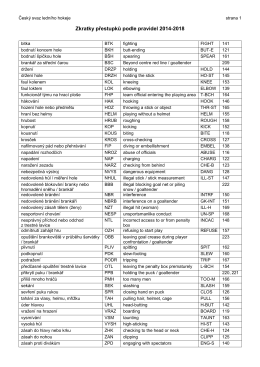
Zkratky přestupků podle pravidel 2014-2018 - rozhodci
EU projekti
100 misli filozofa
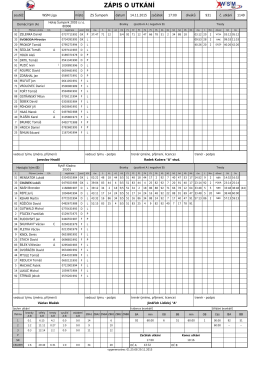
2015-11-14 Sumperk vs. Kladno
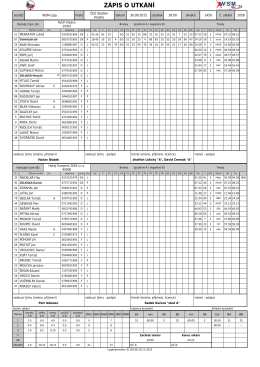
2015-09-30 Kladno vs. Sumperk