Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Seminarski rad o196 Terestricki laserski skener..
Baši biblioteka
Seminarski rad Ivana Toržic 363.pdf
ÖNSÖZ İstanbul Teknik Üniversitesi İnşaat Fakültesi
UVOD U GEOGRAFSKE INFORMACIONE SISTEME
program Konferencije - Sabor geodeta Srbije
INOVA iGEO brošura
pdf - GIS Day Serbia
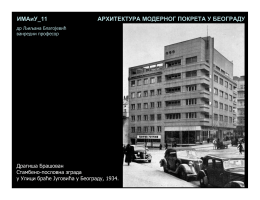
ИМАиУ_11 АРХИТЕКТУРА МОДЕРНОГ ПОКРЕТА У БЕОГРАДУ
OSNOVE ELEKTROMAGNETSKOG ZRAČENJA
Zápisnica OZ zo dňa 30.10.2013
učební text
Celá stať v dokumentu PDF - Acta chirurgiae orthopaedicae et
İndir - Teknolojik Araştırmalar
Program rada i Financijski plan Zajednice sportskih
GeoGebra priručnik - ICT u nastavi-školska obuka
Fact Sheet 2016 français
Gymnázium Federica Garcíu Lorcu
GIS a životní prostředí 2015 - Katedra hydromeliorací a krajinného
coupes goodyear
DASDIFFUSION Central Management Standart Console
คุณลักษณะเครื่องวัดค่าปริมาณของแข็งที่ละลา
Kształcenie uczniów zdolnych w Holandii