Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
ÖNSÖZ İstanbul Teknik Üniversitesi İnşaat Fakültesi
RobotOkulu e-Dergisi Sayı 12
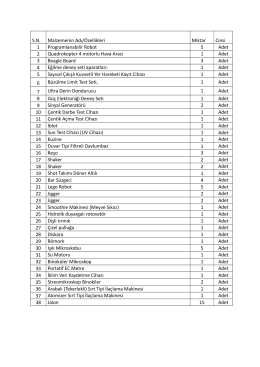
ŞARTNAME SON HALİ
ı. güzyarılyılı - Osmaniye Korkut Ata Üniversitesi
Özel Çakabey Okulları Anaokulu Bülteni
BÖLÜM 18: Mikrobiyal Modeller
Radyasyon dedektörleri - Prof.Dr. Ahmet Bozkurt
6102 Kodlu Lisans Eğitimi Ders İçerikleri (Türkçe)
GPS ve Uygulamaları
Bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
Tek Port Laparoskopik Cerrahi Aletleri Güncelleme
e-katalog - Bellezza Halı
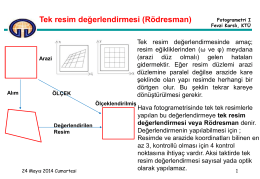
Tek resim değerlendirmesi (Rödresman)
Dengeleme Hesabı
Seminarski rad o196 Terestricki laserski skener..
İGK Golften - İstanbul Golf Kulübü
İçDen Kullanım Kılavuzu - İç Denetim Koordinasyon Kurulu
RI č. 33 - 43. konferencia vodohospodarov - Lipt Jan 2011 - ASPEK-u
KANUNLAR - Resmi Gazete
İndir - Teknolojik Araştırmalar
Makale - Eğitim ve Öğretim Araştırmaları Dergisi
Bosch HGV523123T Kullanım Klavuzu
İndir - Teknolojik Araştırmalar