Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Novica Nosović i Željko Jurić
KATALÓG PRODUKTOV
Kommunikációsegítő alkalmazás beszédsérültek számára
Staráček ročník II. číslo 3
Žiadanka - Investičné poistenie - CK
pytania na zaliczenie wykładu
Kablovi - M&G Electronic
Semestrální práce z předmětu KIV/UPA
1 ÖZGEÇMİŞ 1. Adı Soyadı: Hasan Fehmi Ateş 2
OSNOVI PROGRAMIRANJA
Квадратни трином
ÜNİVERSİTELERİN İNŞAAT VE MİMARLIK BÖLÜMLERİ İçindekiler
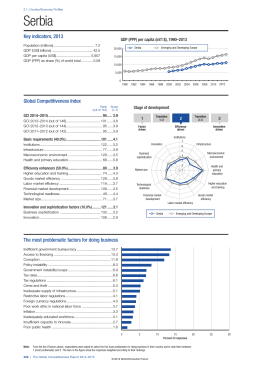
Serbia - weforum.org - World Economic Forum