Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Polinom Filtresi ile Görüntü Stabilizasyonu
Mahalli idareler Seçimi - reyhanlı ilçe millî eğitim müdürlüğü
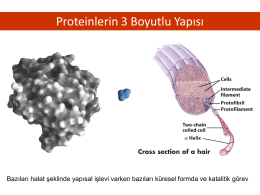
Proteinlerin 3 Boyutlu Yapısı
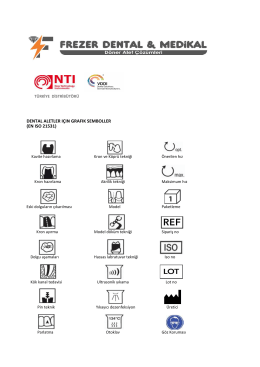
dental aletler için semboller (en ıso 21531)
soubor ve formátu PDF - Učitel chemie
2014 mart - Galip Mühendislik
10. sınıf konu tarama testleri listesi / dil ve anlatım 10. sınıf bilgi
Dış Yatırımların Ekonomik Büyüme üzerine Etkisi: Türkiye Örneği
Załącznik 3 ( 25 KB )
Poster2
KARTA PRZEDMIOTU - Politechnika Poznańska
apachı kont ve cat
KÖSTER KB
Hafta 2
Formaldehit-Alkol Karışımı ve Alkol ile Fikse Edilmiş Bazı Amfibi
8. GÜN
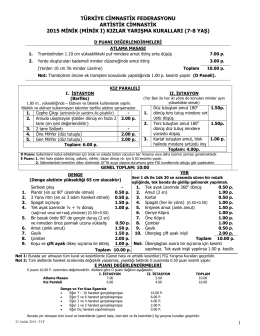
v 6 ı - İstanbul Gençlik Hizmetleri ve Spor İl Müdürlüğü
Intelligent Systems
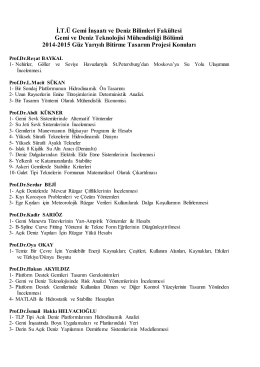
2014-2015 Güz Yarıyılı için Bitirme Tasarım Projesi Konuları
Tester bezpečnosti Quanti
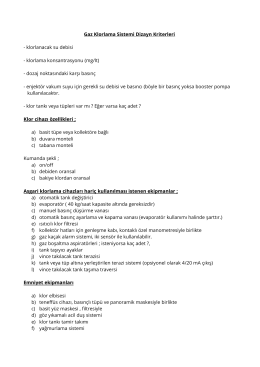
Gaz Klorlama Sistemi Dizayn Kriterleri
Ünite 2: Karışımlar