Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Paralel Işın İzdüşümleri Yöntemiyle Bilgisayarlı
öğretim elemanları için ders tanıtımı veri girişi kılavuzu
Mehmet Gökhan GENEL Haber Anlatı Yapısının Oluşturulma
linkten
Harita Kadastro Teknikerliği B
topoloji ve cebirin günlük hayattaki kullanımı-ı
Selef Düşüncesinin Tarihi Arkaplanı ve Selefilik
Eylemsizlik Momenti
Lisans ders içerikleri - izmir yüksek teknoloji enstitüsü elektrik
Radar Video Kullanılarak Konum Tespiti_siu2014
Manchester Metodu Đle Yeniden Yüzlendirme
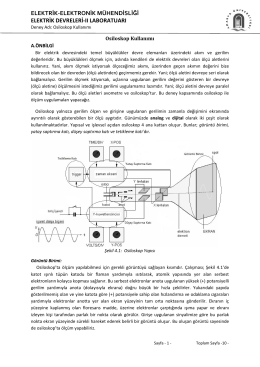
Bölüm1 - Elektrik-Elektronik Mühendisliği