Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Bir TTCAN Sisteminde Matris Çevrimi Tasarımı: PSA Benchmark
Labview Tabanlı Bir Elektronik Deney Seti Geliştirilmesi
AHİLİK TEŞKİLATI (NIN) VE TÜKETİCİLERİN KORUNMASINA
Tam Makale/PDF
TEMEL EKG - yeditepetip4
akademik bilişim 2014 - Akademik Bilişim Konferansları
BURUK VEDA
Korisne informacije - Repubblica e Cantone Ticino
Elektrik Enerjisi Güneşten Sağlanan Bir İş İstasyonunun Kablosuz
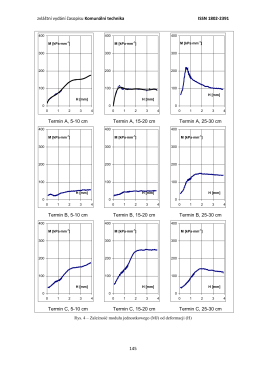
zvláštní vydání časopisu Komunální technika ISSN 1802
can/ttcan sistemlerin uppaal aracı ile modellenmesi - CEUR
Životopis - Katedra kybernetiky a biomedicínského inženýrství
ağır ticari araç süspansiyon sisteminde konfor ve dayanım
Kamusal Bulut Servisleri için Bulanık Mantığa Dayalı Bir Güven Modeli
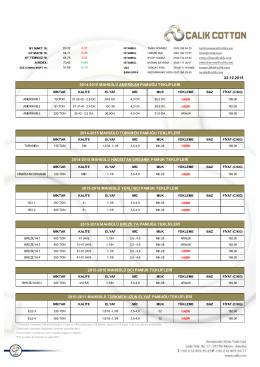
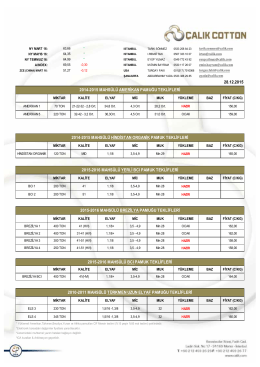
22.12.2015 Günlük Kotasyonumuz
ELEKTROKARDİYOGRAFİ
24.12.2015 Günlük Kotasyonumuz
28.12.2015 2010-2011 mahsülü türkmen uzun elyaf pamuğu
2014 1.Çeyrek Mali Tablo ve Denetçi Raporları
Produktový list v českém jazyce
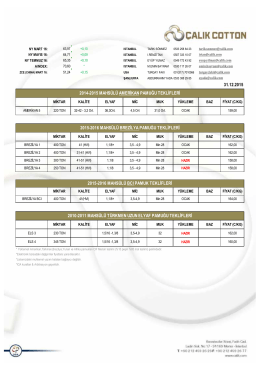
31.12.2015 Günlük Kotasyonumuz
temel kimya dersinde öğrencilerin kavramları anlama ve sayısal
Brochure théâtre 2016_2017 - Site du Conservatoire de Lille