Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
pobierz - Home page of Ignacy Duleba
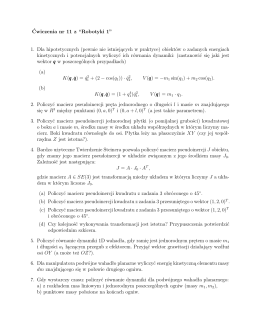
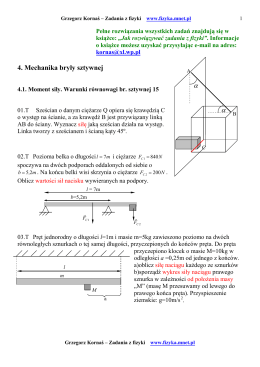
Ćwiczenia nr 11 z “Robotyki 1” 1. Dla hipotetycznych (pewnie nie
KURKI KULOWE ZK-K
Instrukcja do ćwiczeń Nr 1
Proste układy mechaniczne 1. Na pochyłej powierzchni o kącie
Wstęp do Programowania Matematycznego Lista zadań nr 2
Zaproszenie do udziału w przetargu i składania ofert
Zalecenia pokontrolne - Łódzki Urząd Wojewódzki w Łodzi
8. Šetnje pod morem / Sprehodi pod morjem
088uch 088uch
Wykład 3
Spectral Cartan analysis of anisotropic structures based on Garner
tutaj - Parafia Rokitnica
Wykład 3
Aventos HK-XS.pdf
48-powtorka_10_drgan.. - Włodzimierz Wolczyński
pobierz - Home page of Ignacy Duleba
1) W ostrosłupie prawidłowym czworokątnym pole - zse
Ćwiczenia dziesiąte Probabilistyka – lista 7 kierunek: matematyka
regulamin regionalnego konkursu wiedzy o teatrze
Uzupełniająca LISTA ZADAŃ - bazy przestrzeni liniowych
MACover instrukcja
Akademia LOTOS dla wszystkich