Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Logické systémy
Nerovnosti a úprava na štvorec
8.4 DYNAMICKÁ NEDOKONALOSŤ KOMBINAČNEJ ČASTI
Kódovanie stavov
Zborník Príprava a vlastnosti progresívnych keramických materiálov
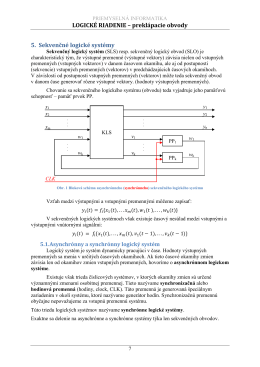
18_Preklápacie obvody
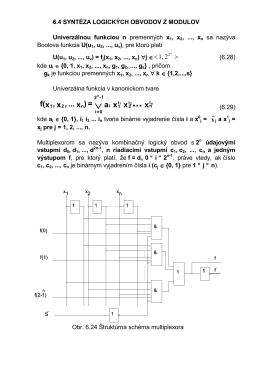
Syntéza logických obvodov z modulov
Základy číslicovej techniky.pdf
LOGICKÉ SYSTÉMY
CENÍK DS 5
Okruhy otázok z LS
Logické systémy doc. RNDr. Jana Galanová, PhD. RNDr
NEU
DAŇOVÉ ZAŤAŽENIE V KRAJINÁCH V4
kniha 3r CNC.pdf
Gündemin 41.Maddesi - Antalya Belediyesi
Zmluvné podmienky politickej reklamy
Kótované zobrazenie - Univerzita Komenského
3.r. - Stredná priemyselná škola
Krátkodobé opatrenia v súvislosti s kvalitou ovzdušia v Žiline
1/2014
Predavanje 10 - Vanr.prof.dr. Lejla Banjanović
Verilog ve ISE Sunum